KONSEI 핸드&척 로봇 주변기기 > 유닛 상품
페이지 정보

본문

핸드 & 척 로봇 주변 기기 목록
유닛 상품
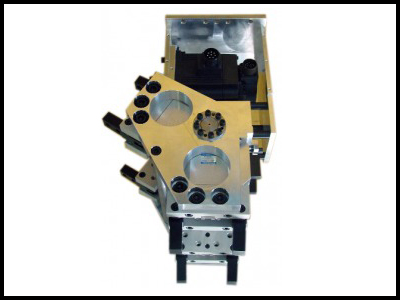
고속 선회 W척 유닛
EXJ
서보 모터 구동에 의한 스윙 선회 유닛.
■ 선회 시간 0.6초.
고속 선회시에 발생하는 충격·진동을 서보 모터로 제어. 사이클 타임의 대폭 단축을 실현합니다.
■샤프트 워크 대응.
2개의 손으로 긴 워크를 안정적으로 클램프. 120도 스윙식 때문에 공간 절약적인 로딩 언로딩이 가능.
■ 스키마 조정기구 부착.
회전축의 가타 조정이 가능하고 고내구성. 유지 보수가 간단합니다.
■핸드・모터 변경 가능.
특수 대응으로 핸드(HJ-63AS)・서보 모터(미쓰비시제 HC-SFS-102B)를 변경합니다. 문의하십시오.
※서보 앰프는 고객 주문이 됩니다. 다음 형식 중에서 선택하십시오. (서보 앰프 형식 미쓰비시제 MR-J2S-100A 또는 100B 또는 100CP)
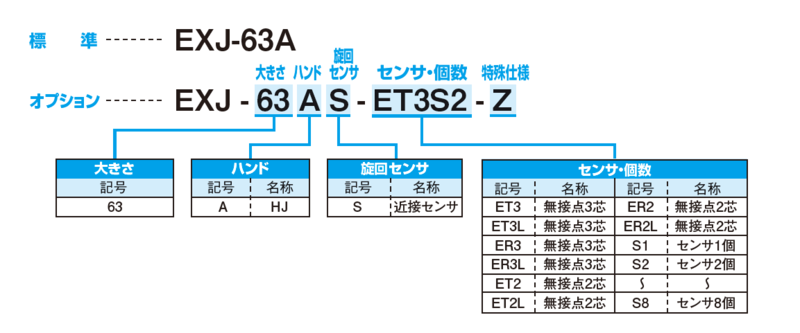
형식표시방법
사양
| 형식 | EXJ-63A | |
|---|---|---|
| 구동원 | 소용돌이 | AC100V( 서보 모터) |
| 손 | 에어 0.3~0.7MPa | |
| 윤활 | 소용돌이 | 극압 첨가제 함유 윤활유(VG150) |
| 손 | 무급유 또는 터빈유 1종(VG32) | |
| 주위 온도 (℃) | 5~60 | |
| 소용돌이 시간 | 0.6sec 이상/120° | |
| 대상 워크 질량 (kg) | 20 | |
| 대상 핸드 형식 | HJ-63AS×4대 | |
| 개방 각도 | -3°~28° | |
| 파지력(P=0.5Mpa) | 8000N | |
| 본체 질량 (kg) | 45 | |
※대상 워크 질량은 손톱의 길이에 따라 바뀝니다. 대상 핸드 형식의 파지력으로부터 검토해 주십시오.
다운로드
카탈로그(사양서・치수도)
카탈로그 다운로드| 형식 규격 | 옵션 | DXF 데이터 | STEP, IGES 데이터 |
|---|---|---|---|
| EXJ-63A |  | |
옵션 사양 세부 사항
첨부파일
-
EXJ.pdf (7.8M)
0회 다운로드 | DATE : 2024-02-13 12:04:07 -
オプション仕様 2.pdf (249.2K)
0회 다운로드 | DATE : 2024-02-13 12:04:07
- 이전글핸드&척 로봇 주변기기 > 유닛 상품 24.02.13
- 다음글핸드&척 로봇 주변기기 > 유닛 상품 24.02.13