Sankyo Seisakusho 포지셔너 RU 시리즈
페이지 정보

본문


롤러 드라이브는, 정밀도・강성・내구성이 뛰어난 구조인 롤러 기어 캠 기구를 응용한, 궁극의 회전계 고성능 위치 결정 유닛입니다. 내부 구조는 서보 모터의 제어 특성에 맞추어 설계되어 있어 정확하고 부드러운 움직임은 물론, 동작의 고속화, 위치결정의 고정밀도화, 중하중 구동용의 고토크화, 가공 품질 향상의 을 위한 고강성화와 같은 각각의 용도에 특화된 다양한 제품 바리에이션을 전개하고 있습니다.
롤러 드라이브의 기계 요소로서의 역할은 직교축 타입의 감속기로 분류되지만, 성능은 그것과 크게 다르다. 많은 기어식이나 웜식 감속기에 보이는 치면의 미끄럼선 접촉에 의한 동력 전달에 대해, 롤러 드라이브는 롤러 팔로워에 의한 구름면 접촉에 의한 동력 전달입니다. 또한 기어의 맞물림이 백래시를 제거할 수 없는 구조에 대해 롤러 드라이브는 롤러플로워에 예압을 가함으로써 완전히 백래시를 제거할 수 있습니다.
이 차이는 롤러 드라이브가 다른 감속기와 비교하여 전달 효율, 기계 수명, 외력에 대한 유지력이 뛰어나 백래시가 없는 구동이 가능하다는 최대의 특징으로 나타납니다. 그리고 감속기로서의 이용뿐만 아니라 고정밀도 위치 결정 테이블, 가공기의 회전축, 로봇의 관절 등 폭넓은 용도로 활약하는 큰 가능성을 갖고 있습니다.
롤러 드라이브의 도입 실적으로서는, 기계의 위치결정축, 액정 유리 기판의 단면 연마 장치, 대형 유리 기판 반송 로봇, 자동차용 대형 용접기용 포지셔너, 태양광 발전 패널의 자동 추종 장치, LED 선별기 등, 다 방면에서의 채용을 들 수 있습니다.
특히 주요 일본 국내 공작기계 제조업체의 고정밀 위치결정 회전축으로서 100,000축 이상의 도입 실적이 있습니다.
일반적으로 사용되는 미끄럼 접촉의 웜식에 대해, 구름 접촉의 롤러 드라이브는 부품의 마모나 열화에 의한 정밀도의 경년 변화가 없고, 정기적인 교정이나 조정 작업은 필요 없고 초기의 정밀도를 길게 유지할 수 있으므로 유지 보수 비용을 크게 줄일 수 있습니다.
대형 유리 기판 반송 로봇이나 자동차용 대형 용접기용 포지셔너의 예에서는, 일반적인 구동원에 의한 종래의 장치와 비교하여 반송 시간에 현저한 시간 단축을 달성할 수 있었다고 고객으로부터 호평을 받아, 롤러 드라이브를 채용한다 함으로써 고객의 상품의 우위성이 현격히 향상되는 사례를 많이 얻고 있습니다.
꼭 이 궁극의 롤러 드라이브를 사용 받고, 원 랭크상의 포지셔닝을 실감해 주세요.
롤러 드라이브의 기계 요소로서의 역할은 직교축 타입의 감속기로 분류되지만, 성능은 그것과 크게 다르다. 많은 기어식이나 웜식 감속기에 보이는 치면의 미끄럼선 접촉에 의한 동력 전달에 대해, 롤러 드라이브는 롤러 팔로워에 의한 구름면 접촉에 의한 동력 전달입니다. 또한 기어의 맞물림이 백래시를 제거할 수 없는 구조에 대해 롤러 드라이브는 롤러플로워에 예압을 가함으로써 완전히 백래시를 제거할 수 있습니다.
이 차이는 롤러 드라이브가 다른 감속기와 비교하여 전달 효율, 기계 수명, 외력에 대한 유지력이 뛰어나 백래시가 없는 구동이 가능하다는 최대의 특징으로 나타납니다. 그리고 감속기로서의 이용뿐만 아니라 고정밀도 위치 결정 테이블, 가공기의 회전축, 로봇의 관절 등 폭넓은 용도로 활약하는 큰 가능성을 갖고 있습니다.
롤러 드라이브의 도입 실적으로서는, 기계의 위치결정축, 액정 유리 기판의 단면 연마 장치, 대형 유리 기판 반송 로봇, 자동차용 대형 용접기용 포지셔너, 태양광 발전 패널의 자동 추종 장치, LED 선별기 등, 다 방면에서의 채용을 들 수 있습니다.
특히 주요 일본 국내 공작기계 제조업체의 고정밀 위치결정 회전축으로서 100,000축 이상의 도입 실적이 있습니다.
일반적으로 사용되는 미끄럼 접촉의 웜식에 대해, 구름 접촉의 롤러 드라이브는 부품의 마모나 열화에 의한 정밀도의 경년 변화가 없고, 정기적인 교정이나 조정 작업은 필요 없고 초기의 정밀도를 길게 유지할 수 있으므로 유지 보수 비용을 크게 줄일 수 있습니다.
대형 유리 기판 반송 로봇이나 자동차용 대형 용접기용 포지셔너의 예에서는, 일반적인 구동원에 의한 종래의 장치와 비교하여 반송 시간에 현저한 시간 단축을 달성할 수 있었다고 고객으로부터 호평을 받아, 롤러 드라이브를 채용한다 함으로써 고객의 상품의 우위성이 현격히 향상되는 사례를 많이 얻고 있습니다.
꼭 이 궁극의 롤러 드라이브를 사용 받고, 원 랭크상의 포지셔닝을 실감해 주세요.



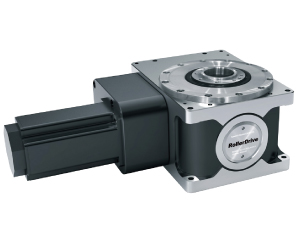
RU80〔고감속 사양〕
용도에 구애받지 않고, 정밀도·강성 등의 성능면과 고감속비·내환경 대응 등의 기능면을 양립한 폭넓은 산업에서 사용할 수 있는 만능 모델. 견고한 특징을 가지기 때문에, 절삭이나 카시메 가공 등 큰 하중이 걸리는 가공기의 분야에서도 사용할 수 있다.
|RU40|RU63|RU80|RU100|RU125|
대형 타입
|RU160|RU200|RU250|RU315|RU400|RU500|
대형 타입
|RU160|RU200|RU250|RU315|RU400|RU500|

소형 모터로 고부하 구동을 실현
독자적인 감속 기어를 사용한 고감속 사양을 라인업하고 있기 때문에, 소형의 서보 모터에서도 큰 구동력을 실현할 수 있다.
감속비는 1/20, 1/60(RU40만 1/15, 1/45)
감속비는 1/20, 1/60(RU40만 1/15, 1/45)
가공기에도 사용할 수 있는 높은 강성
내부 구조의 재검토, 주철제 케이스, 고강성 출력 베어링의 채용에 의해 종래품(당사 RA 시리즈) 대비 5배 이상의 강성을 실현.
(강성이란 축, 레이디얼, 모멘트 하중)
※가공기에서 사용하는 경우는 방수 방진 옵션을 선택해 주십시오.
(강성이란 축, 레이디얼, 모멘트 하중)
※가공기에서 사용하는 경우는 방수 방진 옵션을 선택해 주십시오.
서보 모터의 선정 자유도가 높음
폭넓은 사이즈의 서보모터를 장착 가능(각사 서보모터에 대응) 서보모터는 커플링 체결을 위해 처음
사용하는 사용자라도 간단하게 장착할 수 있다.
사용하는 사용자라도 간단하게 장착할 수 있다.
까다로운 환경에서도 사용 가능
특수 씰을 사용한 방수 방진 옵션을 준비하고 있으므로, 물이나 분진이 날리는 환경하에서도 사용할 수 있다.
비상 정지의 충격에 지지 않는 강성
선회중에 비상정지 등의 급정지를 실시해도 유닛 내부의 파손을 초래하지 않는 강성을 확보하고 있습니다.


용접 포지셔너
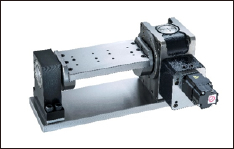
가공기용 테이블

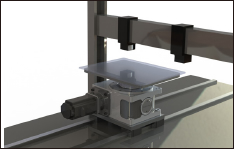
유리 단면 연삭 장치
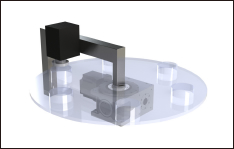
중공축 사용 로터리 테이블
자동차 용접·조립 공정

자동차 용접·조립 공정

RU40~RU125 능력표[그리스 윤활시]
| 사이즈 | RU40 | RU63 | RU80 | RU100 | RU125 | |||||||
| 감속비 | 15 | 45 | 20 | 60 | 20 | 60 | 20 | 60 | 20 | 60 | ||
| 기동 정지시 상한 토크 | N・m | 67 | 155 | 211 | 647 | 1,098 | ||||||
| 정정격 출력 토크 | N・m | 100 | 250 | 360 | 1,000 | 1,800 | ||||||
| 최고출력 회전수 | min -1 | 200 | 150 | 125 | 100 | 80 | ||||||
| 정격 출력 회전수 | min -1 | 60 | 40 | 35 | 30 | 30 | ||||||
| 입력축 환산 내부 관성 모멘트 | ×10 -4 kg· m2 | 0.53 | 0.15 | 1.85 | 0.53 | 5.05 | 1.94 | 9.51 | 5.45 | 32.99 | 13.51 | |
| 위치결정 정밀도 | 표준 정밀도 사양 | arcsec 이하 | 90 | 60 | 40 | |||||||
| 고정밀 사양 | - | 30 | 20 | |||||||||
| 반복 정밀도 | 표준 정밀도 사양 | arcsec 이하 | ±10 | ±7 | ±5 | |||||||
| 고정밀 사양 | - | ±3 | ±2 | |||||||||
| 출력축 축 방향 흔들림 (V면) | 표준 정밀도 사양 | μm 이하 | 10 | |||||||||
| 고정밀 사양 | - | 2 | ||||||||||
| 출력축 레이디 얼 흔들림 (V면) | 표준 정밀도 사양 | μm 이하 | 10 | |||||||||
| 고정밀 사양 | - | 2 | ||||||||||
| 출력축 허용 축방향 하중 | N | 3,000 | 12,500 | 16,500 | 21,000 | 50,000 | ||||||
| 출력축 허용 레이디얼 하중 | N | 2,000 | 11,000 | 14,000 | 18,000 | 35,000 | ||||||
| 출력축 허용 모멘트 하중 | N・m | 100 | 700 | 1,000 | 1,700 | 5,000 | ||||||
| 본체 질량 | kg | 9 | 10 | 20 | 22 | 35 | 40 | 50 | 55 | 95 | 100 | |
RU40~RU125 능력표[오일 윤활시]
| 사이즈 | RU40 | RU63 | RU80 | RU100 | RU125 | |||||||
| 감속비 | 15 | 45 | 20 | 60 | 20 | 60 | 20 | 60 | 20 | 60 | ||
| 기동 정지시 상한 토크 | N・m | 82 | 191 | 260 | 796 | 1,352 | ||||||
| 정정격 출력 토크 | N・m | 100 | 250 | 360 | 1,000 | 1,800 | ||||||
| 최고출력 회전수 | min -1 | 200 | 150 | 150 | 150 | 150 | ||||||
| 정격 출력 회전수 | min -1 | 86 | 55 | 50 | 45 | 45 | ||||||
| 입력축 환산 내부 관성 모멘트 | ×10 -4 kg· m2 | 0.53 | 0.15 | 1.85 | 0.53 | 5.05 | 1.94 | 9.51 | 5.45 | 32.99 | 13.51 | |
| 위치결정 정밀도 | 표준 정밀도 사양 | arcsec 이하 | 90 | 60 | 40 | |||||||
| 고정밀 사양 | - | 30 | 20 | |||||||||
| 반복 정밀도 | 표준 정밀도 사양 | arcsec 이하 | ±10 | ±7 | ±5 | |||||||
| 고정밀 사양 | - | ±3 | ±2 | |||||||||
| 출력축 축 방향 흔들림 (V면) | 표준 정밀도 사양 | μm 이하 | 10 | |||||||||
| 고정밀 사양 | - | 2 | ||||||||||
| 출력축 레이디 얼 흔들림 (V면) | 표준 정밀도 사양 | μm 이하 | 10 | |||||||||
| 고정밀 사양 | - | 2 | ||||||||||
| 출력축 허용 축방향 하중 | N | 3,000 | 12,500 | 16,500 | 21,000 | 50,000 | ||||||
| 출력축 허용 레이디얼 하중 | N | 2,000 | 11,000 | 14,000 | 18,000 | 35,000 | ||||||
| 출력축 허용 모멘트 하중 | N・m | 100 | 700 | 1,000 | 1,700 | 5,000 | ||||||
| 본체 질량 | kg | 9 | 10 | 20 | 22 | 35 | 40 | 50 | 55 | 95 | 100 | |
대형 사이즈
| 사이즈 | RU160 | RU200 | RU250 | RU315 | RU400 | RU500 | ||||||||
| 감속비 | 24 | 72 | 30 | 90 | 30 | 100 | 32 | 120 | 36 | 120 | 40 | 150 | ||
| 기동 정지시 상한 토크 | N・m | 1,730 (1,410) | 2,170 (1,760) | 6,250 | 8,710 | 15,530 | 26,090 | |||||||
| 정정격 출력 토크 | N・m | 2,400 | 3,090 | 8,140 | 11,720 | 21,290 | 34,950 | |||||||
| 최고출력 회전수 | min -1 | 100 (60) | 65 (40) | 40 | 30 | 25 | 20 | |||||||
| 정격 출력 회전수 | min -1 | 30 (25) | 25 (20) | 20 | 15 | 13 | 12 | |||||||
| 입력축 환산 내부 관성 모멘트 ※1 | ×10 -2 kg ・m 2 | 0.57 (0.41) | 0.26 | 0.68 (0.52) | 0.36 | 3.44 (3.28) | 0.71 | (6.97) | 1.27 | (20.56) | 2.94 | (28.91) | 3.55 | |
| 위치결정 정밀도 | 표준 정밀도 사양 | arcsec 이하 | 40 | |||||||||||
| 고정밀 사양 | 20 | |||||||||||||
| 반복 정밀도 | 표준 정밀도 사양 | arcsec 이하 | ±5 | |||||||||||
| 고정밀 사양 | ±3 | |||||||||||||
| 출력축 축 방향 흔들림 ( V면) | 표준 정밀도 사양 | μm 이하 | 10 | |||||||||||
| 고정밀 사양 | 3 | 5 | ||||||||||||
| 출력축 레이디 얼 흔들림 (V면) | 표준 정밀도 사양 | 10 | ||||||||||||
| 고정밀 사양 | 3 | 5 | ||||||||||||
| 출력축 허용 축방향 하중 | N | 55,000 | 63,000 | 130,000 | 140,000 | 160,000 | 180,000 | |||||||
| 출력축 허용 레이디얼 하중 | N | 43,000 | 48,000 | 95,000 | 110,000 | 135,000 | 150,000 | |||||||
| 출력축 허용 모멘트 하중 | N・m | 9,700 | 16,000 | 38,000 | 65,000 | 110,000 | 200,000 | |||||||
| 본체 질량 | kg | 140 | 155 | 180 | 200 | 380 | 425 | 660 | 705 | 985 | 1,066 | 1,585 | 1,715 | |
※1 ( )안은 표준 감속 사양의 어태치먼트 없는 경우
- 이전글포지셔너 RA 시리즈 24.03.26
- 다음글용접 포지셔너 SP 시리즈 24.03.26