Orbray 소형 모터 > 모터 유닛 > 협동 로봇용 엔드 이펙터 K 3 HAND
페이지 정보

본문

협동 로봇용 엔드 이펙터Collaborative Robot End Effector

최근, 바이오·이화학 실험, 창약 실험, 화장품 개발 실험, 외관 검사 등, 사람과 함께 태스크를 실시하는 협동 로봇이 급증하고 있습니다. 협동 로봇에는 공간 절약성과 설치 용이성 등의 관점에서 소형 경량화가 요구됨과 동시에 다양한 태스크를 실현하기 위해 손쉬운 엔드 이펙터가 요구되고 있습니다. 또한, 엔드 이펙터가 사람에 접촉했을 경우에도 사람이 부상을 입지 않는 안전성도 요구되고 있습니다.
Orbray는, 그 해결 방법으로서, 협동 로봇용 로봇 핸드「K 3 핸드」를 릴리스 했습니다. 「기용(Kiyo)」 「소형(Kogata)」 「경량(Keiryo)」을 양립한 새로운 컨셉의 로봇 핸드입니다.
각 능동 관절에, 비접촉형 출력축 엔코더, 클러치 기구를 탑재한 Orbray 오리지널 소형 로봇 서보를 사용해, 소형 경량이면서, 다 손가락으로 가동 영역이 넓고, 손가락이 워크의 형상에 따르도록 갖고 있다 「친숙한 파지 기능」, 손가락을 닫거나, 넓히거나 하는 기용성과, 사람과의 충돌시, 클러치 기구에 의해 부상을 회피할 수 있는 안전성을 실현하고 있습니다.
고가동역, 손가락의 개폐에 의해, 다양한 손가락 자세, 손가락 끝 배치에 대응해, 이형상의 물건을 다양한 자세로 파지 가능합니다.
또, 손가락마다 파지 기능과 기용 동작의 역할을 분담시킴으로써, 예를 들면 전동 피펫 등의 이화학 기기의 「파지」와 「조작」의 양립도 가능합니다.
또한, 3개 이상의 손가락을 균등 배치함으로써, 파지 시에 손과 워크의 얼라인먼트가 어긋나 있어도, 파지 동작에 수반하여, 자동적으로 워크를 손바닥 중심으로 끌어들이기 때문에, 비교적 거친 위치 결정 심지어 가질 수 있으며 페트리, 웰 플레이트 파지에 적합합니다.
8DOF* 다지 손 최경량의 290g으로, 업계 최소 사이즈의 협동 로봇 암(가반 중량 500g)에도 적합해, 암 작동시의 관성력을 가미해도, 페이로드**100g을 확보할 수 있습니다 .
** 페이로드 = 유효 하중
특징
- 1. 기용=의인화=다손가락·다관절
- → 넓은 가동역 → 이형상 워크를 다양한 자세로 파지
- 2. 소형·경량(중량 290g)※설치 플랜지 제외
- → 소형 협동 로봇 암 가반 중량(~500g)에 적합, 페이로드 100g을 확보
- 3. 안전 = 클러치 탑재, 엣지리스 디자인
- → 사람과의 충돌시 충격을 흡수
사양
| 최대 길이(전개시) | 290mm | 안전 대책 | 각 관절에 클러치 탑재 서멀 셧다운 기능 탑재 | |
|---|---|---|---|---|
| 무게 | 290g | 제어 방식 | 명령 제어 | |
| 지수 | 3 | 통신 방식 | 접속 1 COBOTTA 전용 통신 방식 접속 2 외부 UART 통신 | |
| 자유도 | 합계:8DOF 손가락(Clever):4DOF 타손가락(Standard):2DOF ※다른 손가락→친숙 파지 기구 | |||
| 전원 전압 | DC24V | |||
| 피드백 신호 | 서보 출력축 각도 모터 전류 | |||
| 휴대용 무게 | 100g | |||
카탈로그
협동 로봇용 엔드 이펙터협동 로봇용 엔드 이펙터 데모
 |
K 3 핸드를 원격 조작! (치바 대학) NEW! 최근, 위험한 재해 현장에서의 작업, 원격 취업 등, 사람을 대신해 일하는 원격 조작 로봇의 개발이 활발하고, 범용적인 태스크를 실시하기 위해, 기용인 로봇 핸드가 필요해지고 있습니다. 인간의 손과 로봇 핸드에는 구조의 차이가 있기 때문에 마스터 슬레이브 제어로 자유자재로 조작하는 것이 어려웠습니다. 마스터(조작자의 손)의 파지 동작 데이터를 압축하여 저차원 특징량으로 변환한 후, 슬레이브(K3 핸드)에 송신하고, K3 핸드에 적합한 파지 동작 데이터로 복원 함으로써 , 조작 성이 향상되었습니다. ※지바 대학 대학원 공학 연구원 기계 공학 코스 나미키 아키오 준 교수 제공 |
 |
K 3 핸드/COBOTTA가 분주 작업을 한 손에 담당합니다! 신형 코로나 바이러스가 맹위를 흔드는 가운데, 세균·바이러스 검사수가 급증함과 동시에, 신약의 개발이 급무가 되고 있는 것은 아시는 바와 같습니다. 하지만 종사자(의료 및 연구원) 수에는 한계가 있습니다. K 3 핸드/COBOTTA는 종사자 여러분 대신 24시간 동안 계속 작동합니다. 사진, 동영상은 그 예입니다. 분주 작업, 시험관 파지·조작 등의 태스크에 맞추어, 「기용」인 동작과 자유로운 조작이 가능합니다. 우리는 이 미증유의 사태에 도움이 되고 싶습니다. |
 |
K 3 핸드/COBOTTA는 신약 개발, 화장품 개발을 지원합니다! 다양한 원료를 곱하여 시제품을 만들면서 처방을 설계하고, 각종 평가·분석, 안전성 시험을 여러 번 반복하는 신약, 화장품 개발. 프로토타입 횟수가 수백 번에 달할 수도 있다고 합니다. K 3 핸드 / COBOTTA는 연구자 여러분 대신이 실험을 수행합니다. 동영상과 같이, 시험관의 파지·조작과 같은 「기용」인 태스크가 가능합니다. |
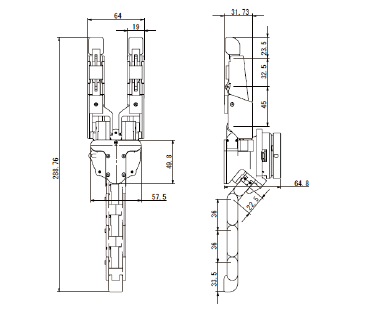
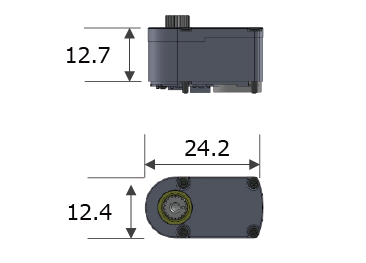
외관도・가동역
|
【가동 각도 범위】
|
구성
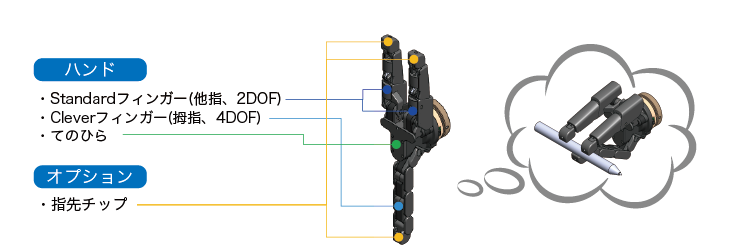
작업에 맞게 손가락 끝 칩 교환 가능
시스템 개요
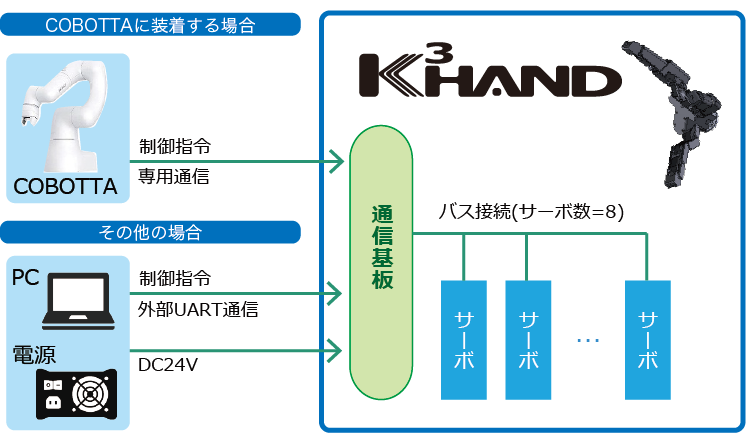
※「COBOTTA」는 주식회사 덴소의 등록상표입니다
|
1. 소형/박형 업계 최소 사이즈 실현2. 소형 로봇의 관절에 따른 원호 형상 3. 고내구 클러치 내장 파손 방지 및 안전성 확보4. 비접촉 전위차계 |
- 이전글소형 모터 > 모터 유닛 > 광간섭식 내주면 정밀 측정기 23.04.25
- 다음글광통신 부품 > 페룰 23.04.25